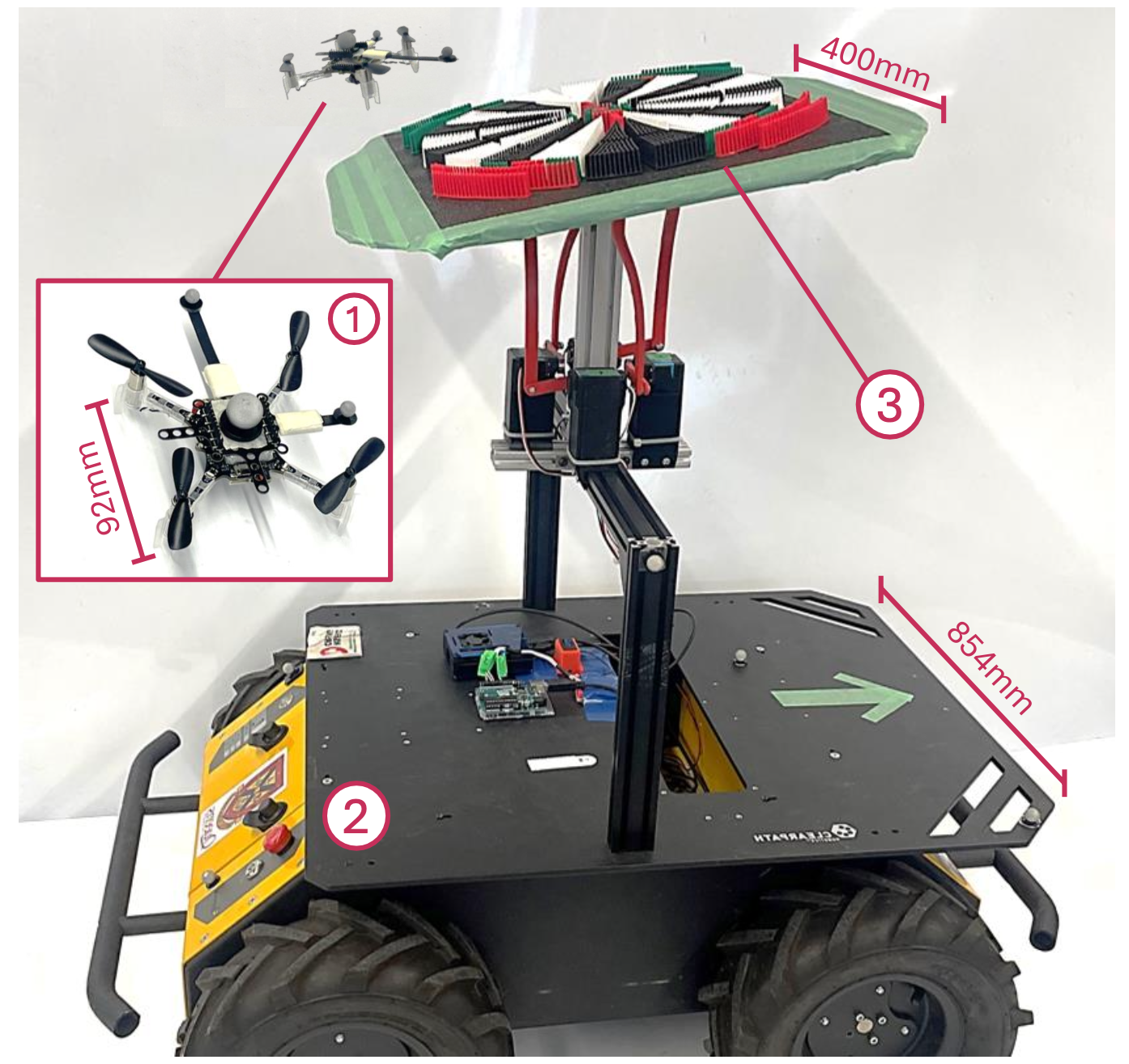
This project develops technology for drones to safely land on moving boats so they can recharge and continue long missions like search and rescue or remote monitoring.
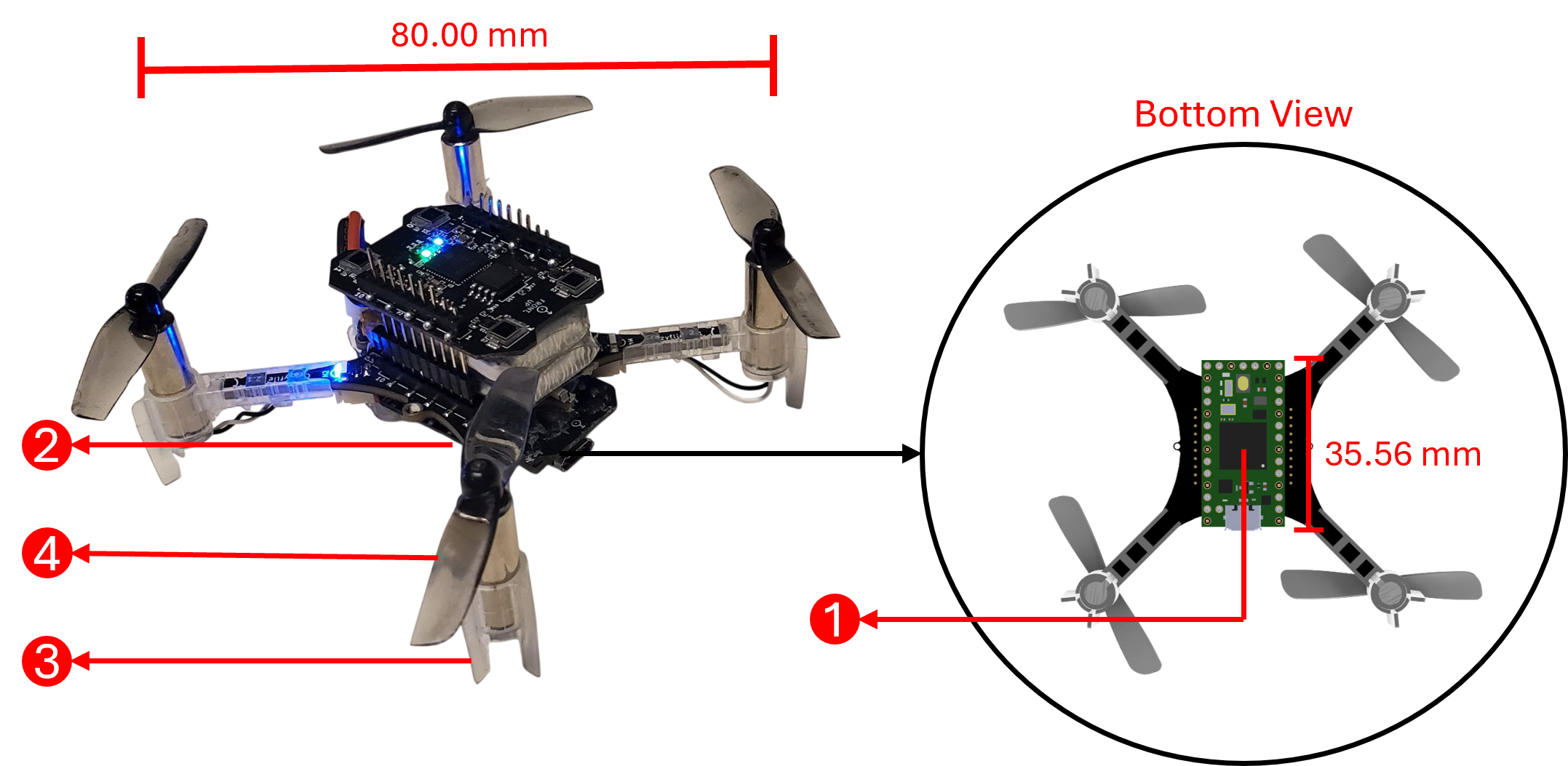
This project develops data-driven control algorithms that let tiny drones fly faster and more accurately—by learning and adapting to aerodynamic forces in real time using lightweight onboard computers.
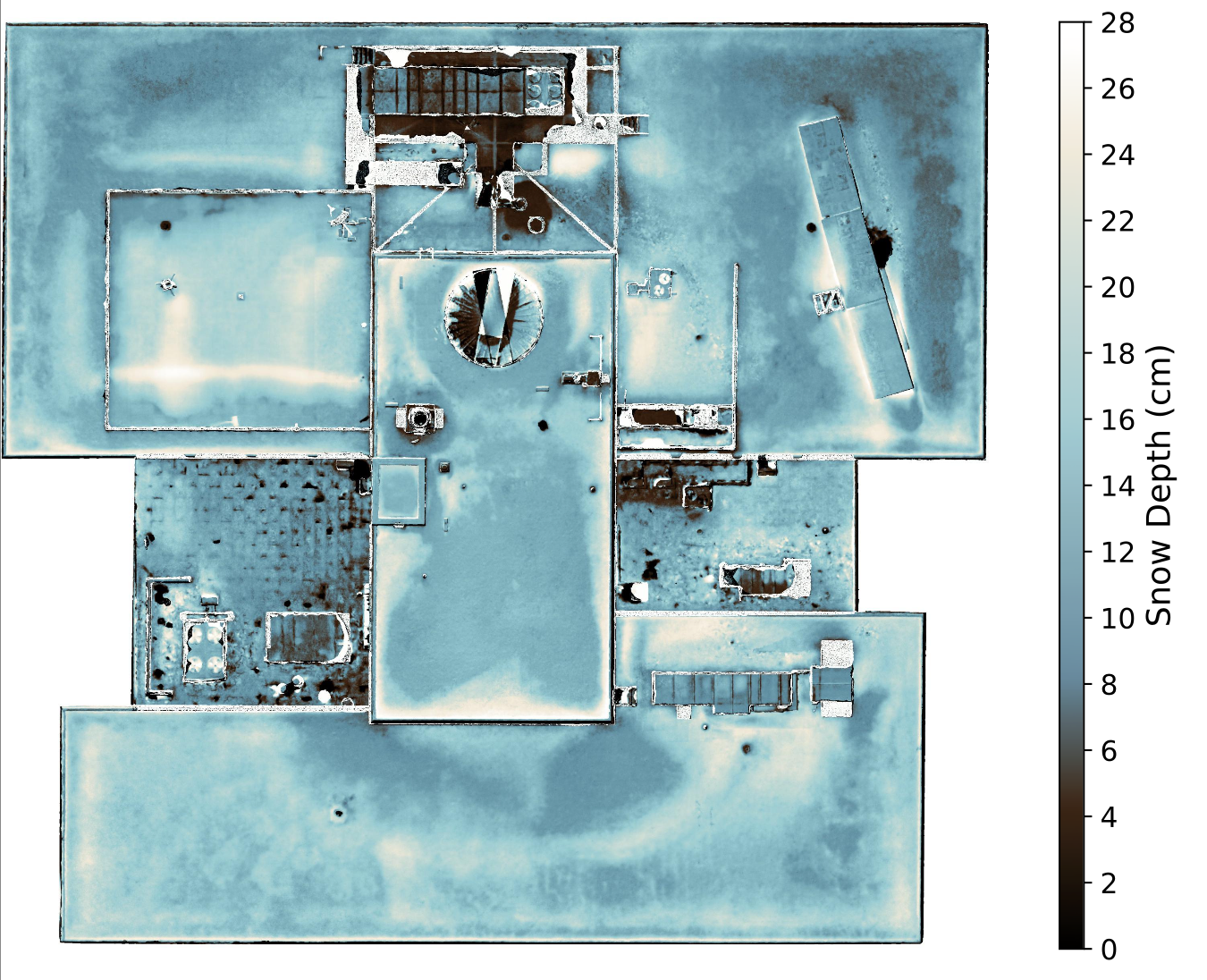
This project uses drones to create 3D models of building envelopes by stitching together overlapping images—a process called photogrammetry—to detect structural risks and heat loss efficiently.
© Robora Lab. Queen's University Canada. Department of Electrical and Computer Engineering